전장설계 시, 필요한 Servo Motor Driver (서보 모터 드라이버)용량 계산 및 회로 구성을 찾고 있나요?
차단기 선정 시, 내가 사용하고자 하는 부하의 용량 및 특성을 알아야 차단기 선정이 가능합니다.
또한, 사양 및 부하의 특성에 따라서 추가적으로 필요한 parts 들이 있습니다.
인터넷에서 ‘전장설계 회로 및 용량 계산’을 검색하면, 용량 계산 및 회로 구성을 알려주는 곳이 없어 이 글을 작성하게 되었습니다.
그럼 각 부하에 따른, 용량 계산 및 회로 구성 알아볼까요?
이 포스팅은 쿠팡 파트너스 활동의 일환으로, 이에 따른 일정액의 수수료를 제공받습니다.
1. Servo Motor Driver(서보 모터 드라이버)의 용량 계산 및 회로 구성

출처:Mitsubishi 홈페이지
용량계산(Capacity Calculation) 및 구성(Configuration) 카테고리를 다룰 때에는 기본적으로 필요한 것이 있습니다.
바로 메뉴얼(Manual)이죠 메뉴얼이 아니더라도 적어도 카탈로그에 우리가 필요한 내용이 적혀 있어야 합니다.
제가 개인적으로 소지만 자료만 약 50GB 정도 되는데요. 그토록 다양한 메이커와 다양한 제품들이 있고 각 부하에 따른 특성이 있습니다.
하지만, 모든 부하들이 마찬가지지만 2가지의 용도와 3가지의 특성이 있습니다. 3가지의 특성은 앞전 “part”부분 카테고리에서도 말씀드렸지만 유도성, 용량성, 저항성 부하 이고 2가지의 용도는 동력, 제어 입니다.
- 부하의 용량 계산과 구성을 알려면, 그 부하의 메뉴얼이 필요하다.
- 부하는 2가지의 용도(동력, 제어)와 3가지의 특성(유도성, 용량성, 저항성 부하)가 있다.
- 해당 Part 는 동력,제어전원이 들어가 있고, 유도성(동력전원) 부하와, 용량성(제어전원)이 포함되어 있다.
1.1. Servo Motor Driver(서보 모터 드라이버)의 용량 계산
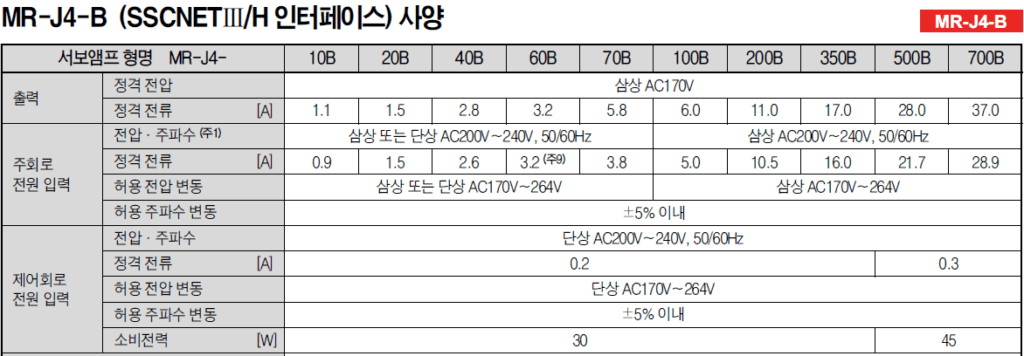
출처: MR-J4 카달로그
위 그림은 자동화에서 많이 쓰이는 Mitsubishi社 의 “MR-J4-B” 카달로그中 일부를 발췌 하였습니다.
위 그림에서 전기용량을 구할때, 필요한 것은 무엇을까요? 바로 주회로 전원 입력 입니다. 우리가 MR-J4-20B(200W Motor 용 Driver) 를 사용한다고 가정 하였을때, 위 카달로그에 적힌 주회로 전원 입력의 “A” 는 1.5A 입니다.
여러분들 전력계산 공식에서 “P=VI” 은 다 아실꺼라고 생각하지만, 3상일 때는 어떻까요? “P=VI*√3” 입니다.
그럼 계산을 해보면 V=220V * I=1.5A * √3=1.732=571.56VA 입니다.
뭔가 이상하지 않나요? 몇몇 선임분들께서, 모터가 200W면 안전률 1.5배 해서 350VA 로 계산 하라는 분들이 많으실 겁니다.
자신있게 말씀드릴 수 있으나, 그 방식은 틀렸다고 말씀드릴 수 있습니다.
이유는 기구설계자는 모터부하 선정 시, 보통 부하율을 50%이내로 잡습니다.
기구물의 부하가 높으면 높을수록 모터의 수명이 낮아지고 또한, 그 만큼 기구물 자체에 마찰계수가 높아 기구물이 파손 될 수 있습니다.
50% 이내로 잡는다는 뜻은 초기 부하 기동 시, 를 제외한 일정한 rpm 에서 전류를 절반 정도 사용한다는 의미 입니다. 위에 계산 값에서 571.56VA의 절반이면 285.78VA 입니다.
즉, 100% 부하 시, 에는 차단기가 떨어질 수도 있습니다.
- W는 유효전력(실제로 동작하는 부하)이다.
- VA는 유효전력과 무효전력(부하를 Control 하기 위한, 전력)을 포함한 전력이다.
- 그러므로, 전기용량 선정 시, 카달로그 및 메뉴얼에 적혀있는 “입력 전원” 의 “A” 및 “VA” 로 계산한다.
- 추가로, 동력전원은 MC(전자접촉기) 2차단, 제어전원은 MC 1차단에 물려 사용한다.
1.2. Servo Motor Driver(서보 모터 드라이버)의 회로 구성

출처: MR-J4-B 메뉴얼
회로를 구성하기 전 미리 말씀드린 것 처럼 부하의 종류를 알아야 합니다.
Servo Motor Driver 의 부하특성은 어떻게 될까요? 모터를 제어하니 “유도성부하”라고 판단하시면 됩니다. 하지만 일반적인 유도성 부하는 아닙니다.
단순히 순수 Coil만 내장되어 있는 부하가 아닌 콘덴서, 다이오드, 코일, 제어기 여러가지 복합적으로 내장되어 있는 부하 입니다.
메뉴얼 상에는 MCCB(배선용 차단기) 및 종속형 CP(회로보호기)를 사용해도 된다고 되어 있습니다.
그럼 저는 어떻게 회로를 구성하는지 보여드리겠습니다.
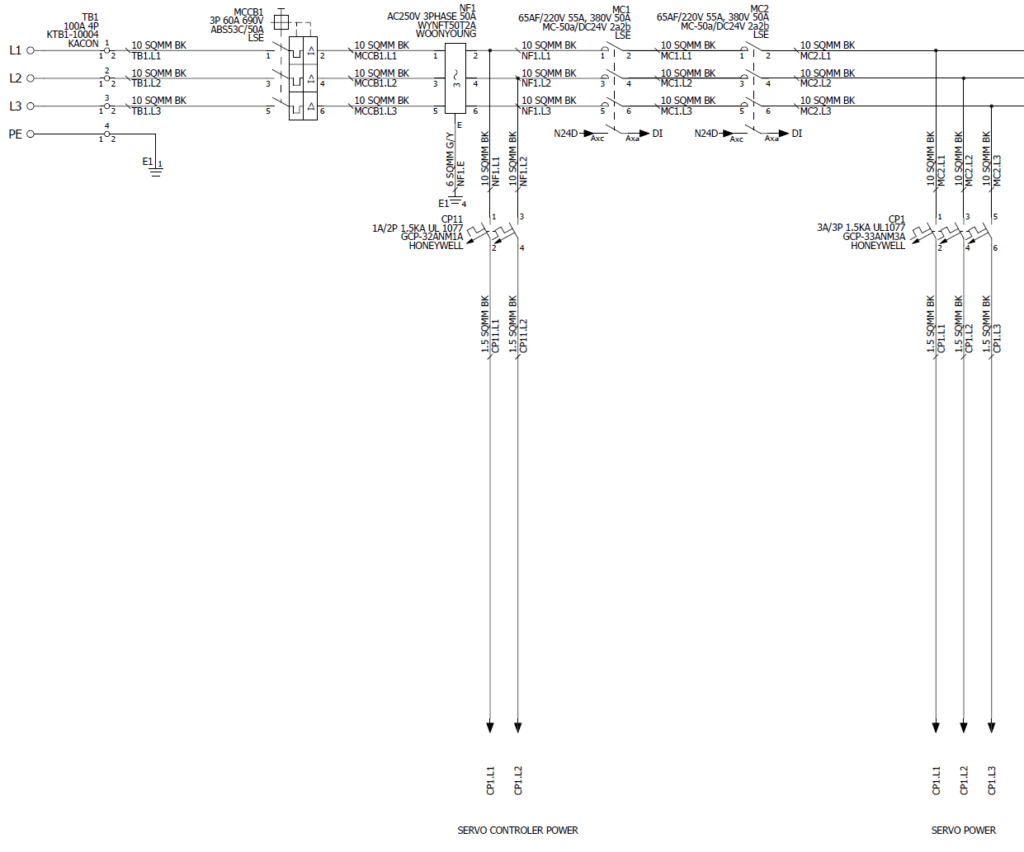
출처: Nalayang
- MCCB: 메인 배선용 차단기. [배선용 차단기 설명 글]
- Noise filter: Servo Motor Driver 와 같이 변조가 많은 Controller or Noise에 민감한 장치 앞단에 사용. [노이즈 필터 설명 글]
- MC: 위 그림에서 MC 는 위험한 상황(긴급 정지) 가 필요할 경우, 동력 차단을 위한 Safety 사양에 따라 2중화 MC 를 설치. [전자 접촉기 설명 글]
- Safety 회로에서 ISO13849-1 “PL d” 이상은 차단장치가 2중화로 되어 있어야 한다.
- CP: Servo Driver의 동력 전원과, 제어 전원을 차단하기 위하여 설치. [회로 보호용 차단기 설명 글]
메뉴얼상에는 Noise filter 를 MC(전자 접촉기) 2차측에 구성하라고 되어있지만, 장비 사양서에는 제어전원은 Noise filter 2차측 Line 에서 구성하라고 되어 있습니다. 하지만 보편적인 고객사의 장비 사양서에 의해 위치를 변경 하였습니다.
또한, 각 고객사 별로 GPS, AVC(제 경험상 LG Dispaly 만있습니다.) UPS 등 부하별 전원구성이 다 다릅니다. (각 고객사별 사양서를 참조하시기 바랍니다.)
- Servo Motor Driver는 유도성 부하로 분류 된다.
- 기본적으로 배선용 차단기를 사용해야 하지만 회로 보호용 차단기는 종속형을 사용하게 되면 크게 문제가 없다. (메뉴얼 기재)
- 동력 Line은 Noise filter 와 동력 차단용 MC(2중화) 를 구성한 후, CP 를 거친다.
- 제어 Line 은 각 고객사의 사양에 따라 다르겠지만, UPS 제어 전원 or GPS(AVC)Line 의 Noise filter 를 거친 MC 1차측에 구성한다.
다음 그림은, Servo Motor Driver 의 상세 도면 입니다.
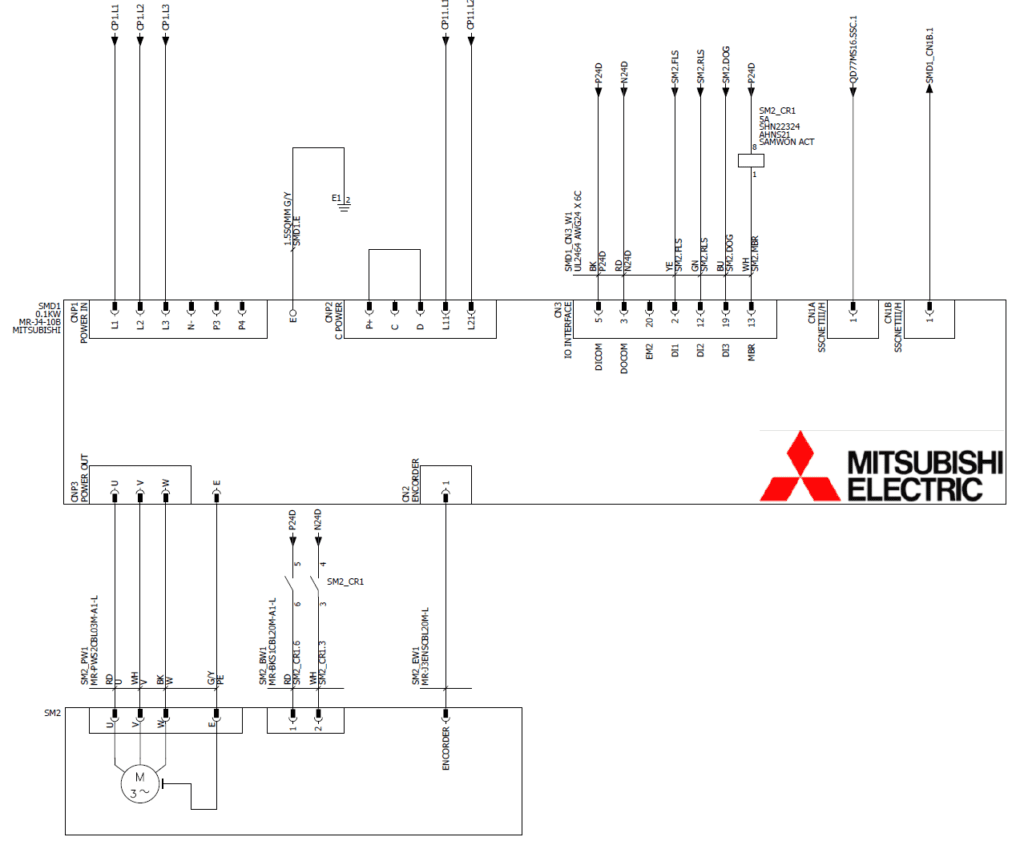
출처: Nalayang
- 동력전원(CNP1): 주로 3상으로 사용하며, 비상 상황 시, 전원을 차단하게 구성.
- 제어전원(CNP2): 단상이며, 항시 전원은 공급해야 한다.
- 전원 Off가 되면, 다음 Driver 부터 통신 Line 이 해제 된다.
- Interface(CN3): 주로 Limit, home Sensor, Brake, 외부 엔코더 신호 등을 주고 받는다.
- 통신(CN1A,B): 해당 모델은 SSCNET III/H 광통신을 이용한다.
- 외부전원(CNP3): Motor에 공급되는 전원이다.
- 외부엔코더(CN2): Motor에 공급되는 엔코더 신호이다.
- 추가로: Brake 신호는 외부에서 24VDC + Relay 접점을 활용하여 사용.
부족하지만 여기까지 봐주신 여러분들께 감사합니다.
지금까지 Part 카테고리를 봐주시고, 해당 용량 계산 및 회로 구성 카테고리를 보신다면 이해 하실꺼라고 판단합니다.
다음 강의에서는 Inverter의 메뉴얼을 보면서 용량 계산 및 회로 구성에 대해서 기본적으로 알아야할 부분을 알려 드리겠습니다.
“Step By Step” 라는 말이 있습니다. 여러분들도 꾸준하게 제 글을 봐주신다면 전장설계를 좀더 쉽게 다가가실 수 있으실 겁니다.
긴 글 읽어 주셔서 감사합니다. 다음시간에 뵙겠습니다.